در این بازی گوی را باید از نقطه شروع به نقطه پایان برسانید
در ساخت این بازی:
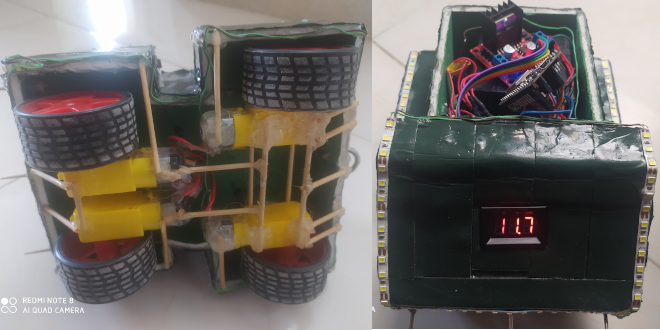
یک برد آردوینو اونو
دو تا باطری لیتیمی
یک برد پاوربانک
دو عدد سروو موتور
یک جوی استیک
استفاده شده است.
برای ساخت بدنه این بازی از مقوای ماکت سازی استفاده شده است.
ویدیو
عکس:

کد:
#include <Servo.h>
Servo myServoX; // define servo motor for X-axis
Servo myServoY; // define servo motor for Y-axis
int ServoXPin = 8; // define X-axis pin
int ServoYPin = 9; // define Y-axis pin
int ServoXHomePos =90; // set home position for servos
int ServoYHomePos =90;
int ServoXPos =103;
int ServoYPos =135;
int XAxlePin = A0; // define X-axis pin control for joystick A0
int YAxlePin = A1; // define Y-axis pin control for joystick A1
int XAxleValue = 0; // set start up value for joystick
int YAxleValue = 0;
int Direction = 0;
int range = 12; // output range of X or Y movement
int center = range/2; // resting position value
int threshold = range/4; // resting threshold
void setup()
{
myServoX.attach(ServoXPin); // attaching servo X
myServoY.attach(ServoYPin); // attaching servo Y
ServoXPos = ServoXHomePos; // update ServoXPos with home position as startup
ServoYPos = ServoYHomePos; // update ServoYPos with home position as startup
myServoX.write(ServoXPos);
myServoY.write(ServoYPos);
Serial.begin(9600);
}
void loop()
{
XAxleValue = readAxis(XAxlePin);
YAxleValue = readAxis(YAxlePin);
Serial.print(XAxleValue,DEC);
Serial.print(" - ");
Serial.println(YAxleValue,DEC);
// check the values of joystick and move the servos smothly with delay of 100 millisecond
if (XAxleValue>0) { ServoXPos++; myServoX.write(ServoXPos); delay(100*(7-XAxleValue)); }
if (XAxleValue<0) { ServoXPos--; myServoX.write(ServoXPos); delay(100*(7+XAxleValue)); }
if (YAxleValue>0) { ServoYPos++; myServoY.write(ServoYPos); delay(100*(7-YAxleValue)); }
if (YAxleValue<0) { ServoYPos--; myServoY.write(ServoYPos); delay(100*(7+YAxleValue)); }
if (ServoXPos>ServoXHomePos+20) { ServoXPos=ServoXHomePos+20; }
if (ServoXPos<ServoXHomePos-20) { ServoXPos= ServoXHomePos-20; }
if (ServoYPos>ServoYHomePos+20) { ServoYPos=ServoYHomePos+20; }
if (ServoYPos<ServoYHomePos-20) { ServoYPos= ServoYHomePos-20; }
delay(10);
}
int readAxis(int thisAxis) {
// read the analog input:
int reading = analogRead(thisAxis);
// map the reading from the analog input range to the output range:
reading = map(reading, 0, 1023, 0, range);
// if the output reading is outside from the
// rest position threshold, use it:
int distance = reading - center;
if (abs(distance) < threshold) {
distance = 0;
}
// return the distance for this axis:
return distance;
}سرچشمه:
https://www.hackster.io/AhmedAzouz/arduino-marble-maze-labyrinth-bd9ea6